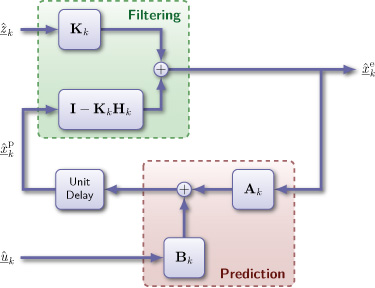
The Kalman Filter algorithm recursively estimates the uncertain state variables of a dynamic process from noisy observations. A process model, which governs the time evolution of the state, is used in the prediction step to calculate an estimate for the subsequent time step. The predicted estimate then serves as prior information in the filtering step and is updated using current observations and the corresponding sensor models. This algorithm embodies an optimal solution to the state estimation problem when system dynamics and observation models are linear and the error statistics of the noise terms are known. Kalman filters have quickly evolved into an important tool for a wide range of sensor data fusion applications.
My research focuses on how to characterize different types of estimation uncertainties, how to distribute and fuse Kalman filter estimates, and how to apply Kalman filters to nonlinear estimation problems.
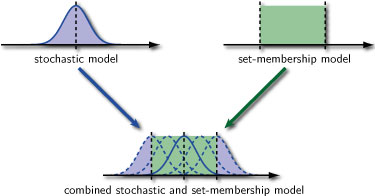
In control and estimation theory, an uncertain quantity is often expressed in terms of either a random variable or an unknown but bounded error. Hence, stochastic and set-membership models of uncertainty are the methods of choice. In combination with each other, both directions of describing uncertainties enable a flexible and comprehensive modeling of different sources of estimation uncertainty. However, common estimation techniques require the user to choose between either one uncertainty model or the other. Much of my research is devoted to generalizations of the Kalman filter algorithm in order to allow for a simultaneous treatment of stochastic and set-membership uncertainties
Distributed and decentralized state estimation techniques become increasingly important in view of the trend towards network-based multi-sensor systems. Networks of multiple sensors offer several advantages over centralized systems including scalability, robustness to node failures, and the ability to monitor large-scale phenomena. Instead of continuously transmitting measurements to a central estimation system, it is usually preferred to compute state estimates at the sensor nodes and to transmit these estimates only when a global fusion result is demanded. The major challenge in distributed information processing is the correct treatment of dependencies between the estimates to be fused. In particular, I am interested in deriving conservative and constistent fusion methods that can be applied to estimates with an unknown dependency structure.
Approaches towards distributed state estimation usually have in common that each locally computed estimate refers to the same state vector.
If a large-scale physical phenomenon is to be monitored, high-dimensional state vectors have to be considered, and a single sensor can only cover a small area of the phenomenon. In a sensor network deployed to monitor this phenomenon, it can be computationally too demanding for a node to maintain an estimate of the entire state vector.
Instead, a more efficient approach is to let each node compute an estimate of that part of the state that is affected by its
sensor observations. This approach not only reduces the computational pressure of the nodes but also reduces the data volume to be transferred by each node. As an further advantage, it is an easy task to expand or reduce the area monitored by the sensor network.
In the situation of unequal state representations, the role of state fusion is not only to provide an improved estimate
but also to assemble an estimate for the entire state from the locally computed lower-dimensional estimates. In particular, the treatment of correlations between overlapping parts is a key challenge.
My research focuses on designing distributed Kalman filtering techniques that can either exploit known correlations or employ conservative bounds on unknown correlations.

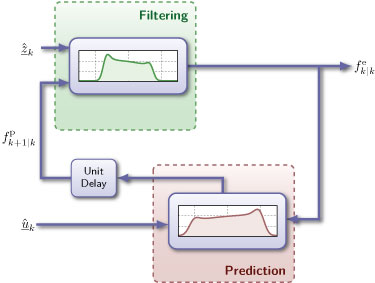
For linear process and sensor models, the Kalman filter represents an optimal solution with respect to the mean squared error. Linear filtering techniques can also be applied to nonlinear estimation problems by determining the necessary covariance matrices or by linearizing the models. In many situations, linear estimates may provide insufficient information about the state, in particular when the conditional probability density of the state is multi-modal. Particle representations and finite-dimensional series expansions are often employed to obtain tractable approximations of the conditional probability density.
I am interested in combining nonlinear estimation techniques with distributed fusion architectures. The parameterization and approximation of nonlinear dependencies is particularly challenging as the dependency structure is related to a high-dimensional joint probability density. In nonlinear contexts, it is still an open question how a conservative approximation has to look like.
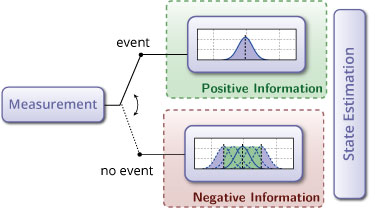
In order to reduce the amount of data to be transferred in networked systems, event-triggered transmission strategies can be employed. Although sensor observations are only sent to the estimator when an event triggers a transmission, the estimator is to be designed to provide stable results periodically in time. In order to avoid an unstable behavior, the event-triggering criterion is turned into implicit measurement information, which is denoted as negative information and modeled as set-membership information. The estimation problem can be solved by a hybrid Kalman filter, which employs a stochastic representation for modeling sensor noise and a set-membership representation for incorporating implicit measurement information derived from event-sampling criteria.
